
① 电流是脉动的,产生谐波分量,尤其在低速时,因此需要加平波电抗器。设备投入大,体积增加,同时电感大又限制了系统的快速性。
② 当系统在较低速运行时,晶闸管的导通角很小,使系统的功率因素很低,并产生较大的谐波电流,引起电网电压波形畸变殃及附近的用电设备,也限制了调速范围。
③ 对过电压、过电流敏感,要注意保护。
◎直流PWM调速系统优点:
① 主电路简单,不用电抗器,用电机本身的电感,从而获得脉动很小的直流电流;
② 开关频率高,电枢电流容易连续,无电流断续问题;
③ 系统的低速运行平稳,调速范围较宽;
④ 频带宽,响应快;
⑤ 功率因数高。电流和电压永远相同,无无功功率问题。
PWM 调速系统和 V-M 调速系统主要区别在主电路和PWM控制电路。闭环控制系统以及静、动态分析和设计基本一样。
PWM 脉宽调速系统的主电路采用脉宽调制变换器。
| 由于采用脉宽调制,严格地说,即使在稳态情况下,脉宽调速系统的转矩和转速也都是脉动的,所谓稳态,是指电机的平均电磁转矩与负载转矩相平衡的状态,机械特性是平均转速与平均转矩(电流)的关系。 采用不同形式的PWM变换器,系统的机械特性也不一样。对于带制动电流通路的不可逆电路和双极式控制的可逆电路,电流的方向是可逆的,无论是重载还是轻载,电流波形都是连续的,因而机械特性关系式比较简单,现在就分析这种情况。 一、带制动的不可逆电路电压方程 对于带制动电流通路的不可逆电路,电压平衡方程式分两个阶段
|
 |
 |
| 式中 R、L —电枢电路的电阻和电感。 二、双极式可逆电路电压方程 对于双极式控制的可逆电路,只在第二个方程中电源电压由 0 改为 –Us ,其他均不变。于是,电压方程为 |
 |
 |
| 式中 R、L —电枢电路的电阻和电感。 三、机械特性方程
按电压方程求一个周期内的平均值,即可导出机械特性方程式。无论是上述哪一种情况,电枢两端在一个周期内的平均电压都是 Ud =
在双极式控制的可逆变换器: 平均电流和转矩分别用 Id 和 Te 表示,平均转速 n = E/Ce,而电枢电感压降的平均值 Ldid / dt 在稳态时应为零。 于是,无论是上述哪一组电压方程,其平均值方程都可写成 |
 |
| 机械特性方程 |
 |
| 或用转矩表示, |
 |
式中 Cm = KmФN —电机在额定磁通下的转矩系数;n0 = Us / Ce —理想空载转速,与电压系数成正比。 Us / Ce —理想空载转速,与电压系数成正比。 |
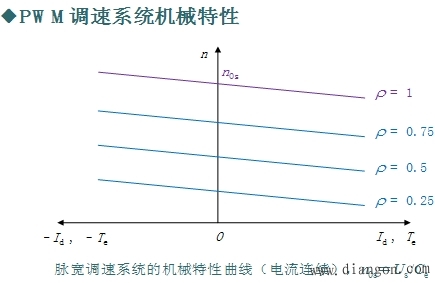 |
| ◎说 明 ·图中所示的机械曲线是电流连续时脉宽调速系统的稳态性能。 ·图中仅绘出了第一、二象限的机械特性,它适用于带制动作用的不可逆电路,双极式控制可逆电路的机械特性与此相仿,只是更扩展到第三、四象限了。 ·对于电机在同一方向旋转时电流不能反向的电路,轻载时会出现电流断续现象,把平均电压抬高,在理想空载时,I d = 0 ,理想空载转速会翘到 n0s=Us / Ce 。 |




